


В тази статия Магьосникът ще ни покаже как е направил действащия хеликоптер Lego 60193 Arctic Air Transport модела quadrocopter. Основната задача при производството на квадрокоптера, освен летателните качества, беше да се спестят колкото се може повече оригинални части.
Нека да видим кратко видео, демонстриращо работата на квадрокоптера.
И така, за производството на такъв квадрокоптер майсторът използва следното
Инструменти и материали:
-LEGO City Arctic Helicopter - 60193:
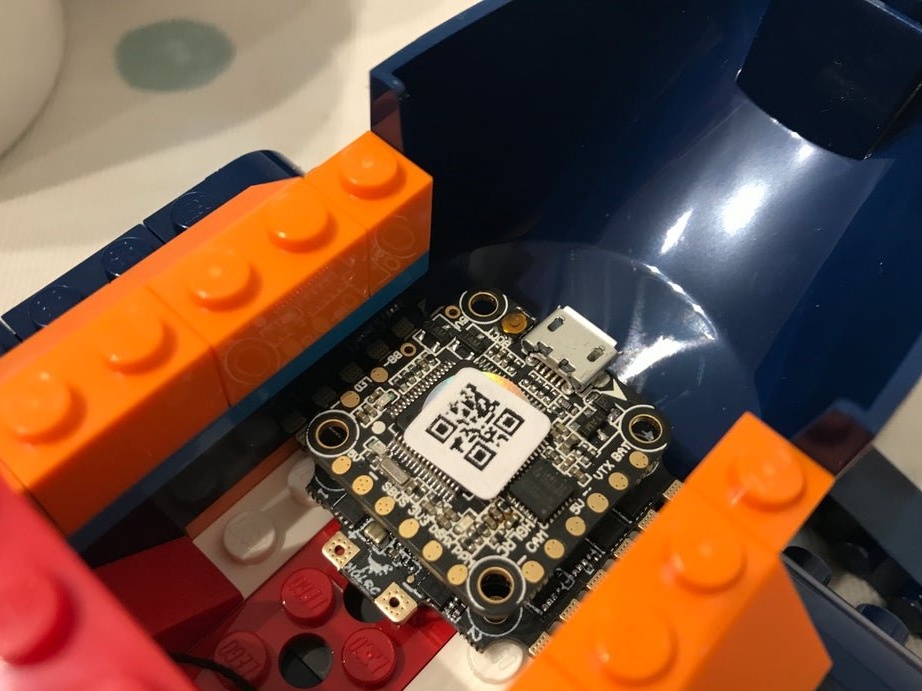
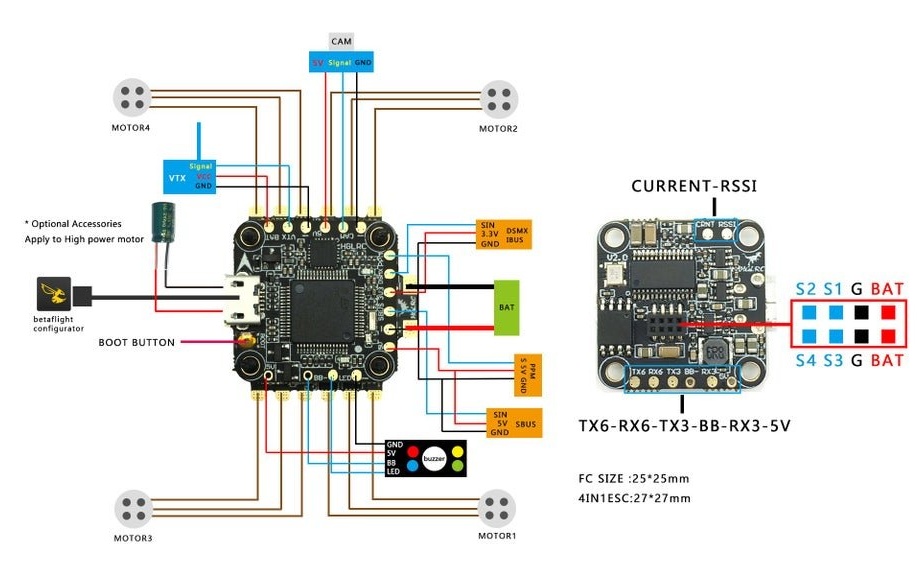
- Контролер и ESC 20x20 mm, например, HGLRC XJB F428 Micro F4 AIO OSD;
- Мотори без четки - 4 бр;
-Propellery;
-Батерия 950 mAh;
-Razemy;
seeing-;
-Радио модул (предавател и приемник);
-Krepezh;
-Nozh;
-Поядащо желязо;
-Лесен пистолет;
- отвертка;
-Drel;
Първа стъпка: Lego Build
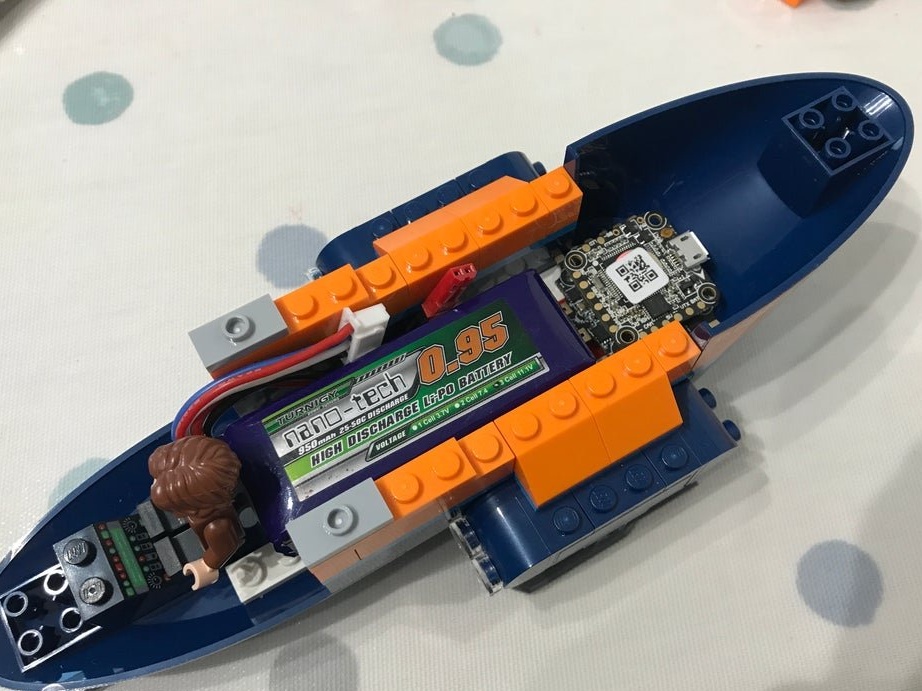
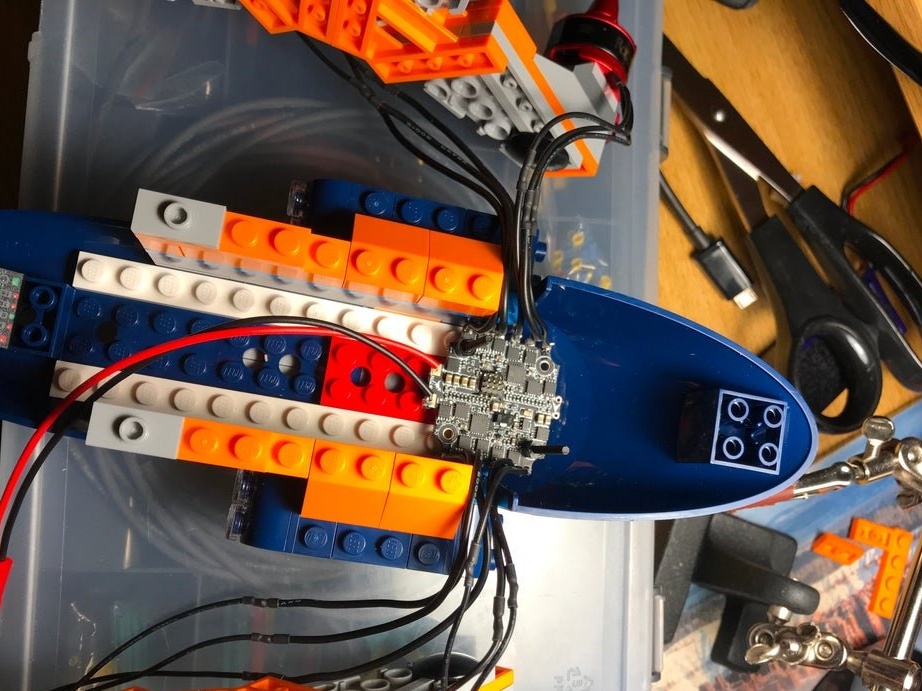
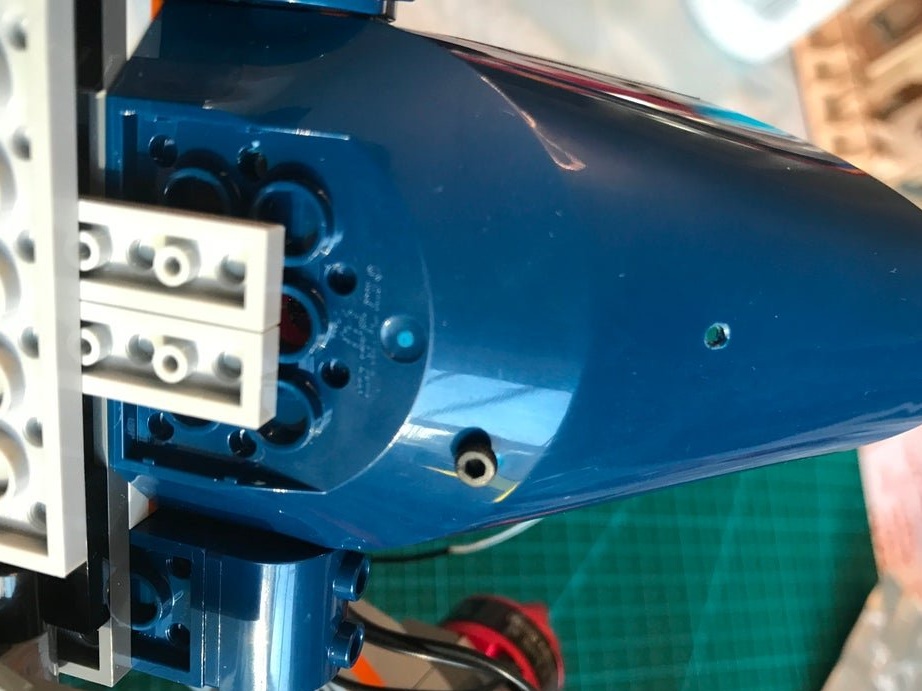
Първо, майсторът събира ЛЕГО-Арктика. Тогава моделът е частично разглобен. Вътре е необходимо да поставите батерията и контролера, като наблюдавате балансирането на модела.


Стъпка втора: Монтаж на двигателя
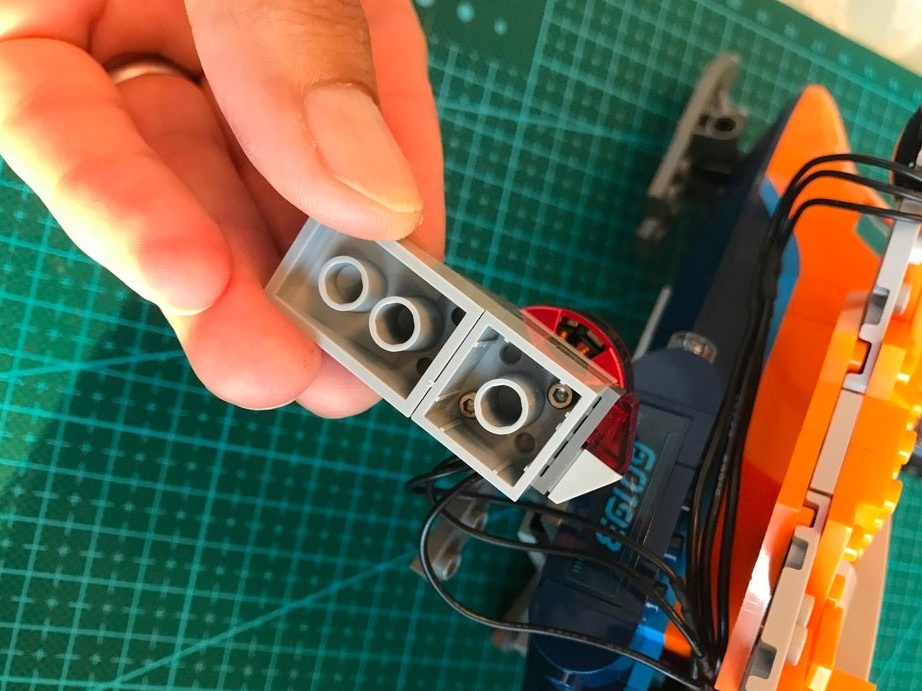
Монтажните отвори за стандартния мотор без четки 1806 са почти същите като шиповете на стандартната плоча LEGO 2x2. Всеки моторен монтаж на квадрокоптера има 2x2 тъмносива плочка (LEGO 3022) и 2x2 светлосива плочка с вертикален щифт (LEGO 2460), който обикновено се държи на главините на витлото на LEGO отгоре.
Майсторът пробива монтажните отвори. На моторите в центъра има отлив. В центъра на плочката се пробива дупка под нея. Защита на двигателите.








Трета стъпка: Раменете
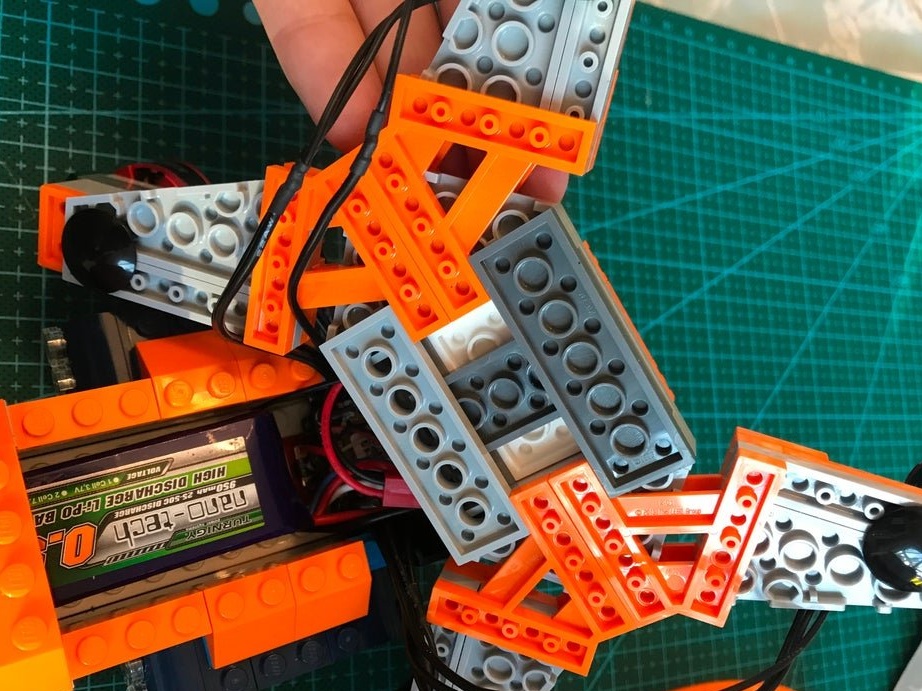
Пренареждайки „раменете“ на квадрокоптера, можете леко да промените оформлението, за да осигурите по-широко или по-тясно разположение на двигателите и местоположението на винтовете един спрямо друг.
Стандартният LEGO монтаж (първа снимка) има „рамене“ и двигатели, разположени широко (хоризонтално) с доста голямо винтово припокриване. Господарят преработва „раменете“ и хвърля двигателя и съответно винтовете.



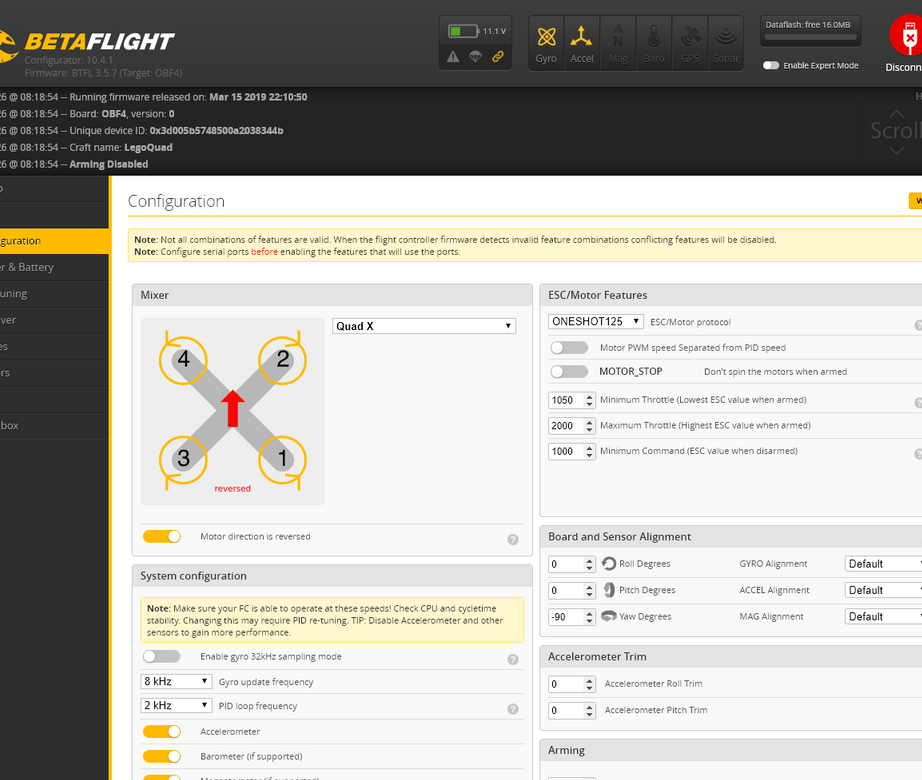
Стъпка четвърта: електроника
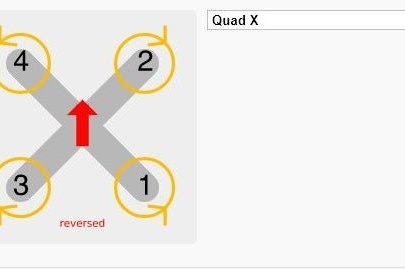
Според схемата инсталира електроника. Първата снимка показва диаграма на посоката на въртене на двигателите. Посоката на въртене може да се променя и на етапа на програмиране.

След като инсталацията приключи и преди да свържете батерията, съветникът проверява връзките, за да предотврати счупване или късо съединение.
Когато включите захранването, трябва да видите светлините на контролера на полета и няколко бипкания от ESC.
Стъпка пета: Настройка
Сега, когато всичко е свързано, е време да конфигурирате контролера.Това означава изтегляне на софтуер (фърмуер), който изпълнява задачата за декодиране на управляващите сигнали от RC предавателя, обработка на входния сигнал на сензора (ускорител, жироскопи) и предоставяне на контролни сигнали за ESC за въртене на двигателите с дадена скорост.
Извадете витлата за безопасност! Не е необходима батерия за първите няколко стъпки за настройка, само USB захранване.
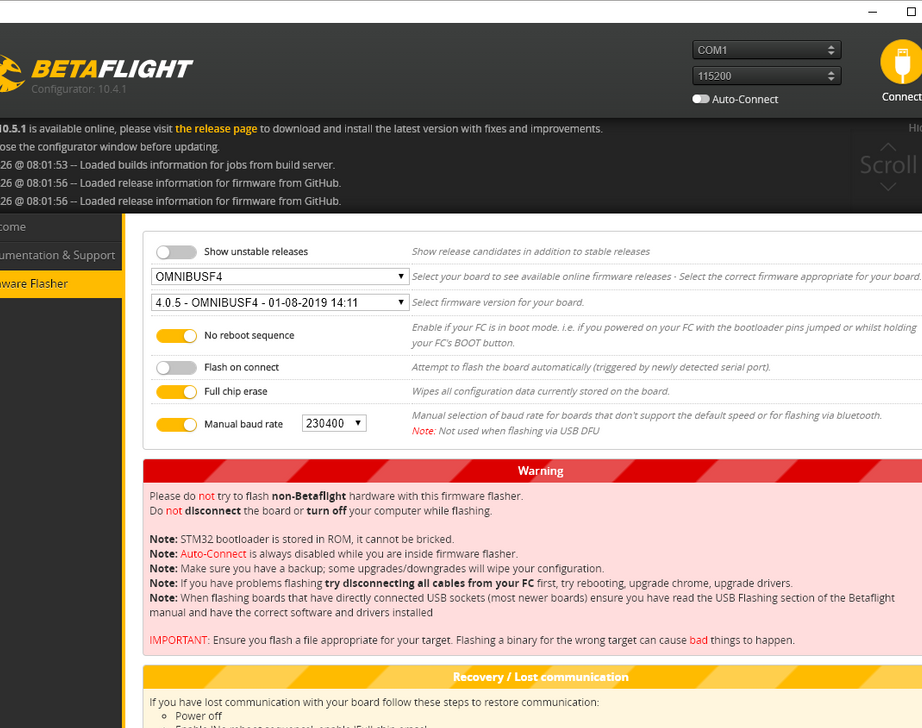
Изтеглете Beta Configurator
Свържете микро USB кабела към контролера на полета. Моля, обърнете внимание, че това може да се направи по-лесно, ако контролерът не е завинтван към шасито.
Изтеглете и качете подходящия фърмуер за полетния контролер.
betaflight-настройки-legoquad.txt
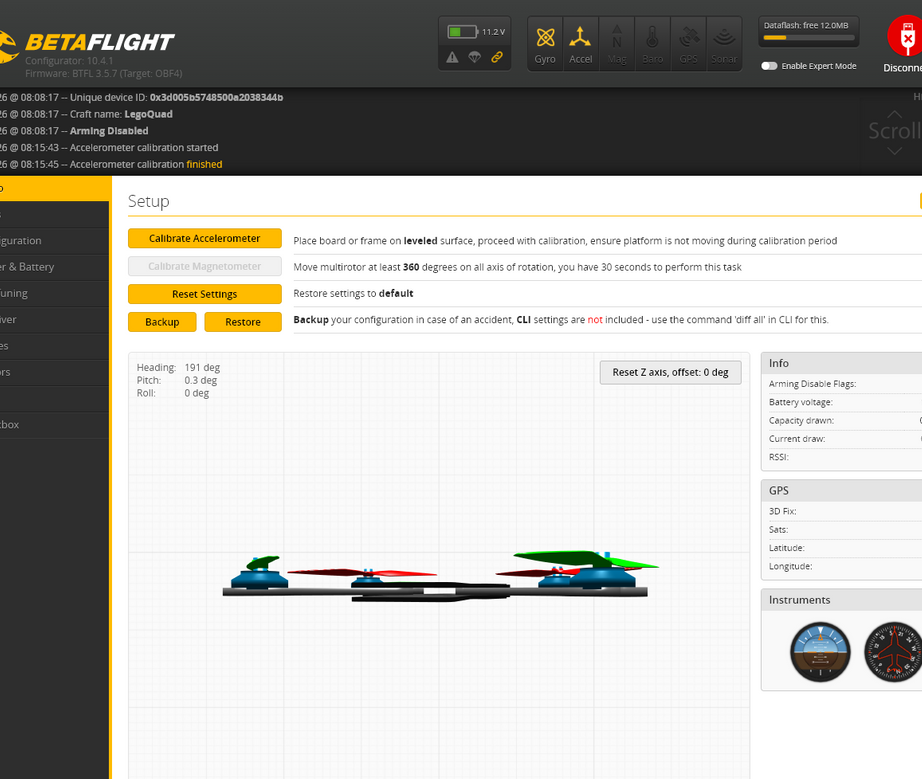
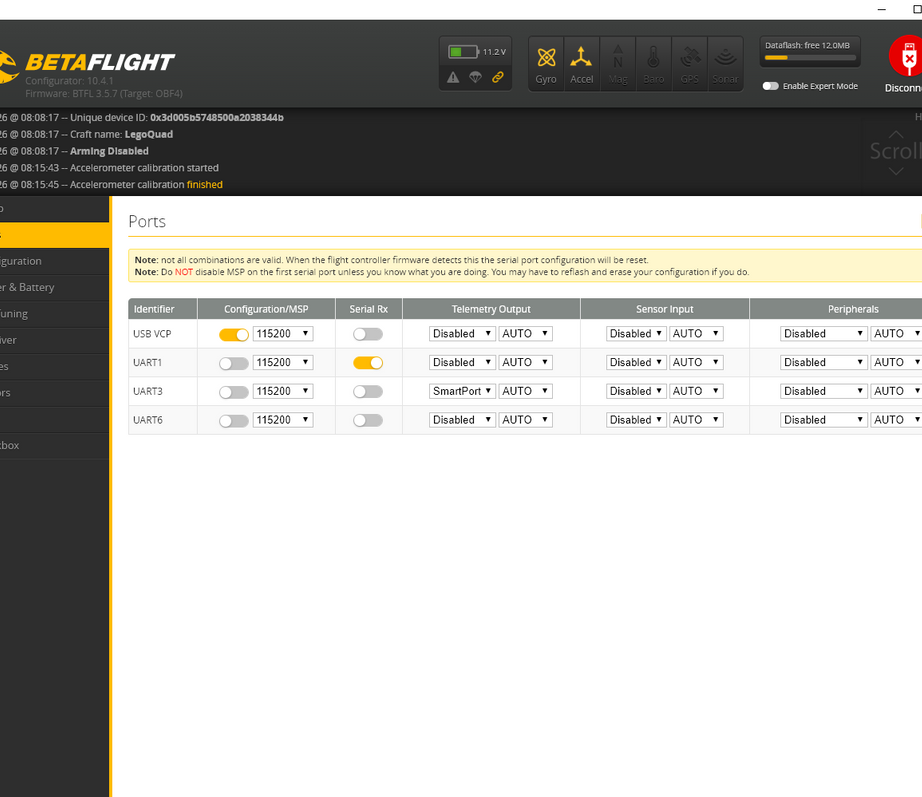
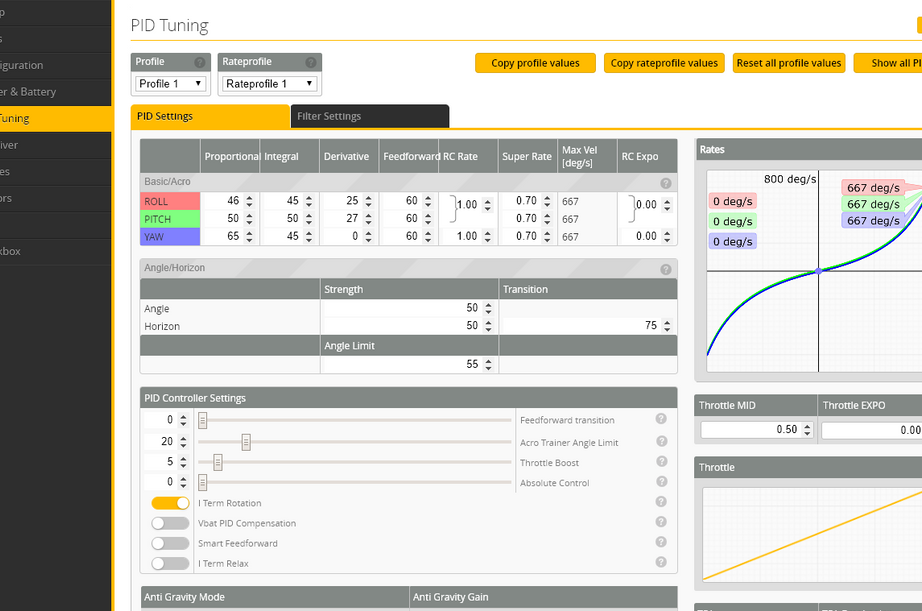
Кликнете върху бутона „Свързване“ и конфигурирайте следните настройки:
1. Настройка - калибриране на модели на двигатели
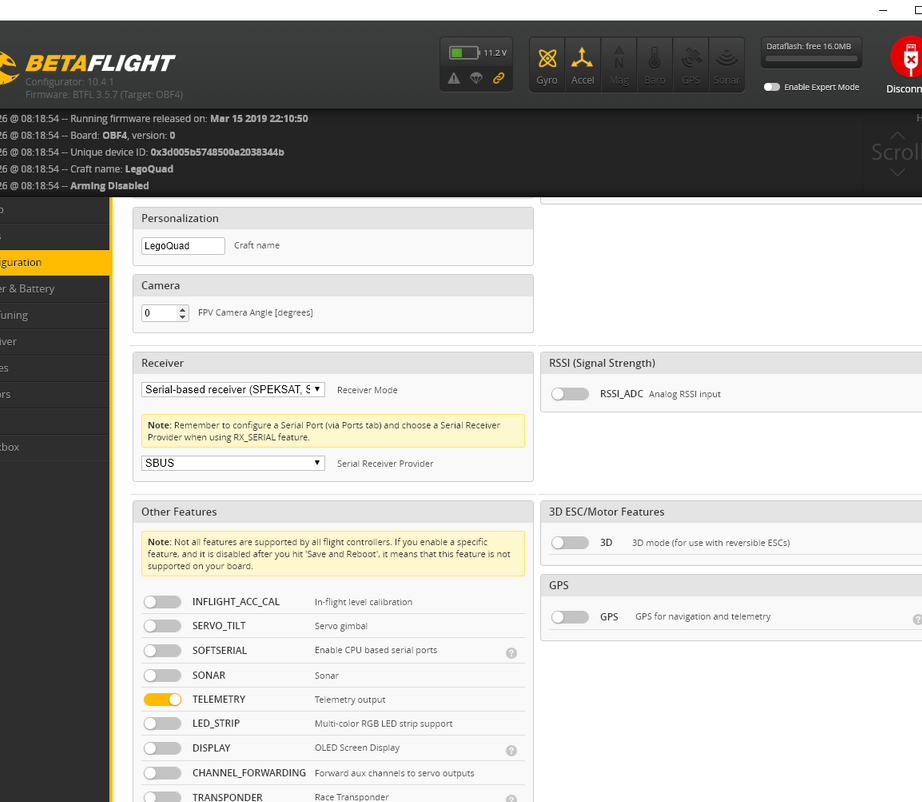
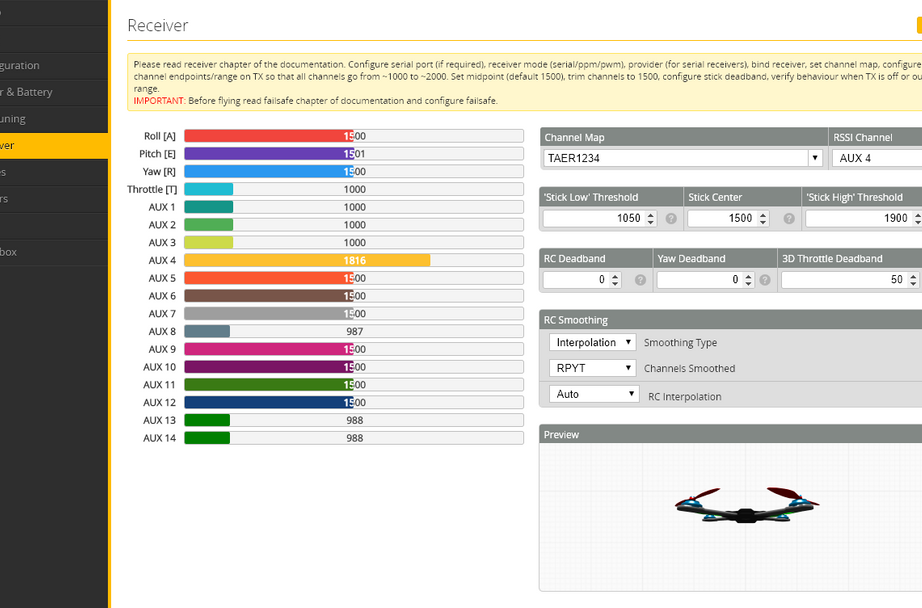
2. Посочете портовете - UART1 - Serial RX за свързване на SBUS RC приемник
3. Запазване и рестартиране
4. Установете връзка между приемника и предавателя
5. Претоварване
6. Стойността за главния PID е зададена на 250
7 Свържете батерията
8. Регулирайте напрежението.
9. Уверете се, че дисплеят на вашия канал и посоката на управление са правилни, когато всичко е настроено, изображението на модела на квадрокоптер в долния десен ъгъл трябва да се движи във всички правилни посоки, когато премествате джойстиците на RC контролера.
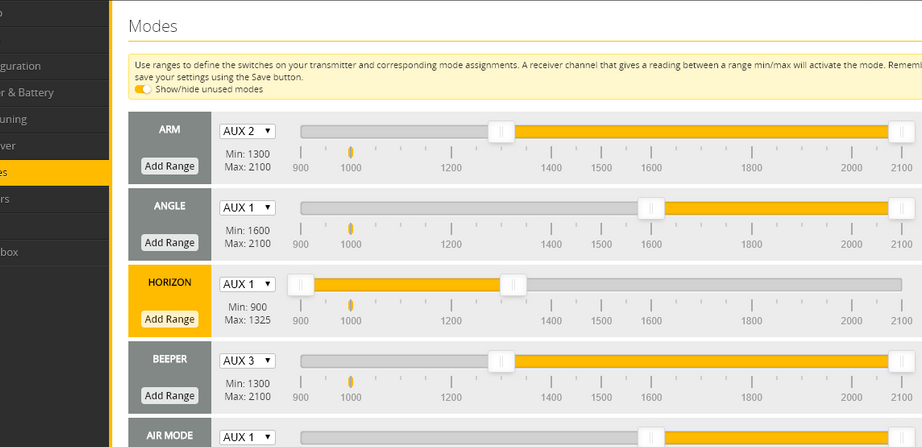
Конфигурира режимите.
Включване / изключване на ARM
HORIZON самонивелиращ се / ACRO за традиционен полет с FPV
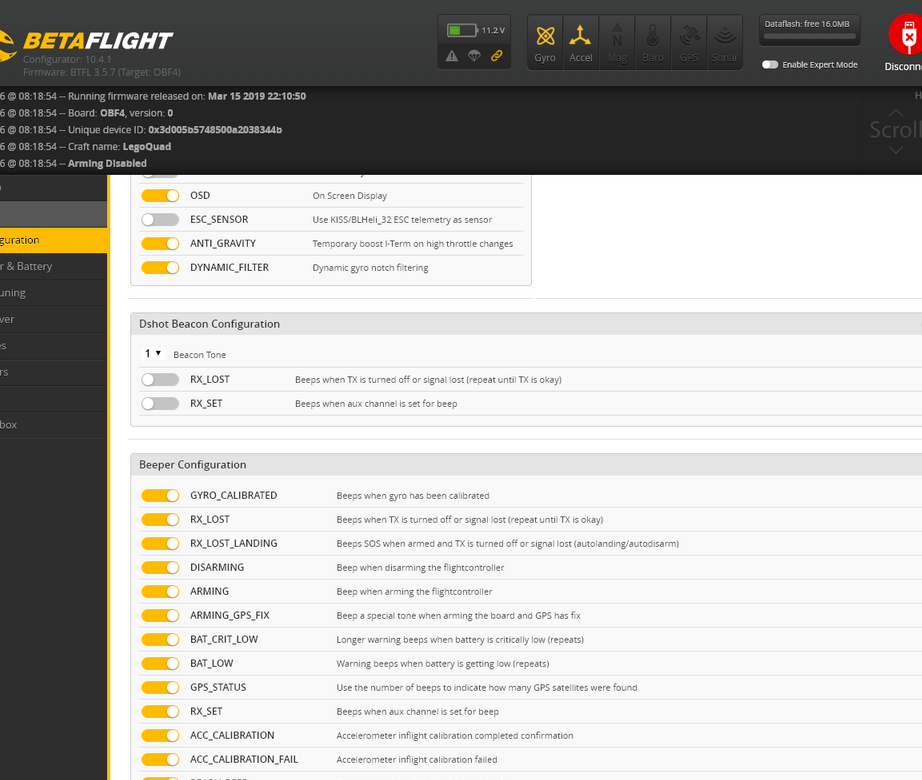
БИПЕР - Полезно, ако загубите модела във висока трева или храсти.
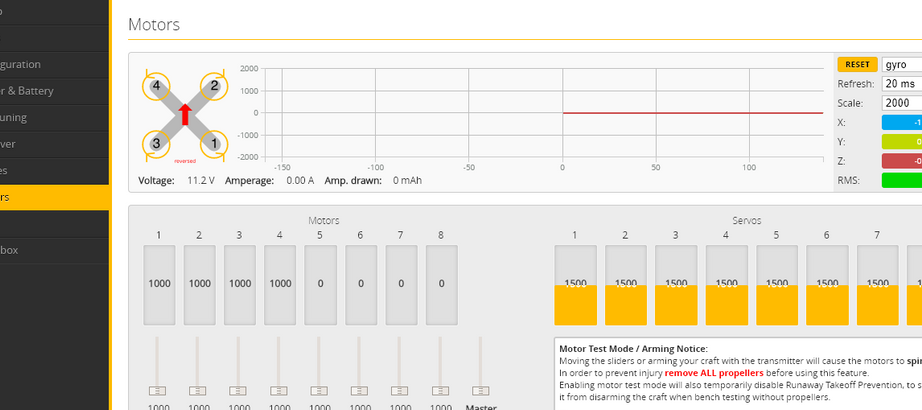
Раздел „Мотори“ - използвайте тази опция, за да проверите всеки двигател поотделно и, важното, маркирайте посоката на въртене на всеки от тях
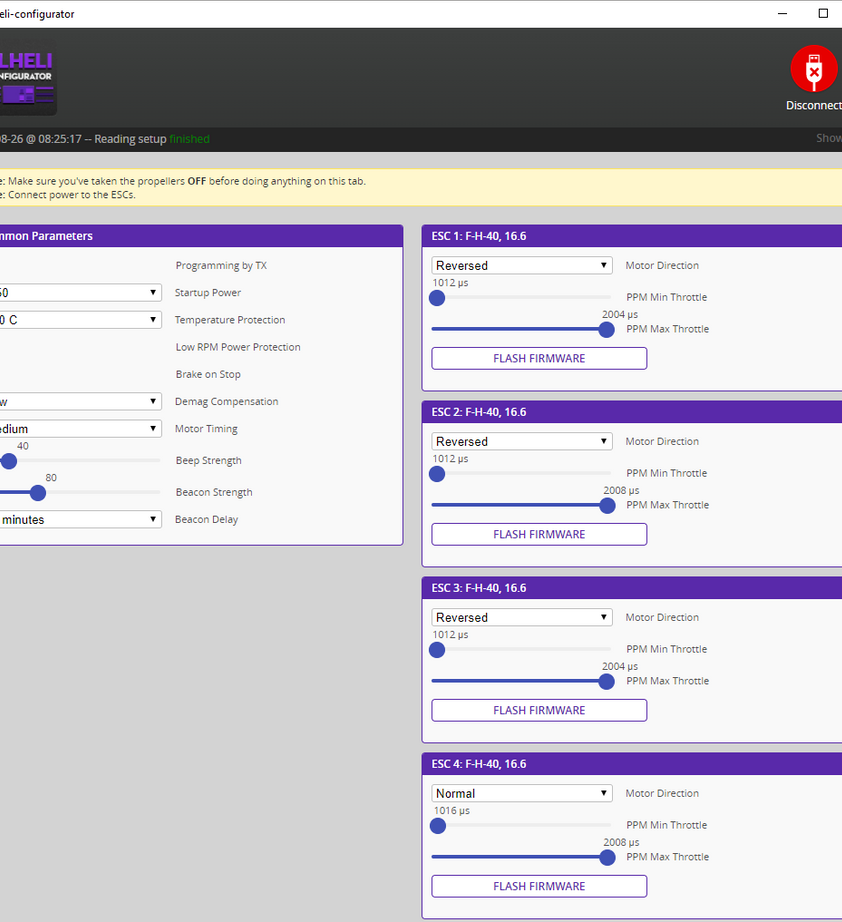
Коригирайте всяка неправилна посока на въртене с конфигуратора BLHELI
След всички тези стъпки можете да изключите USB и батерията и след това да включите захранването и да проверите дали всичко работи:
Включете предавателя и захранването
Свържете батерията и монтирайте квадрокоптера върху равна повърхност
Включете превключвателя ARM и двигателите трябва да започнат да се въртят с ниска скорост.
Проверете газта, докато увеличавате скоростта
В хоризонтален режим опитайте да наклоните квадрокоптера и се уверете, че двигателите реагират по подходящ начин, например го наклонете напред и предните двигатели ще се ускорят.

Стъпка шеста: Заключително събрание
Почти цялата структура на калъфа се държи с монтажни брави. Майсторът използва само лепило за разтопяване за монтиране на моторите.


Всичко е готово и можете да тествате.



